
Mavic 3 classic屏控航线(航点)飞行教程
准备工作
遥控手柄(带屏)
航线规划软件(网页) - Rainbow Cloud
SD卡, 读卡器, 电脑
1. 创建航线
首先, 打开Rainbow Cloud网站.
网页界面如下:
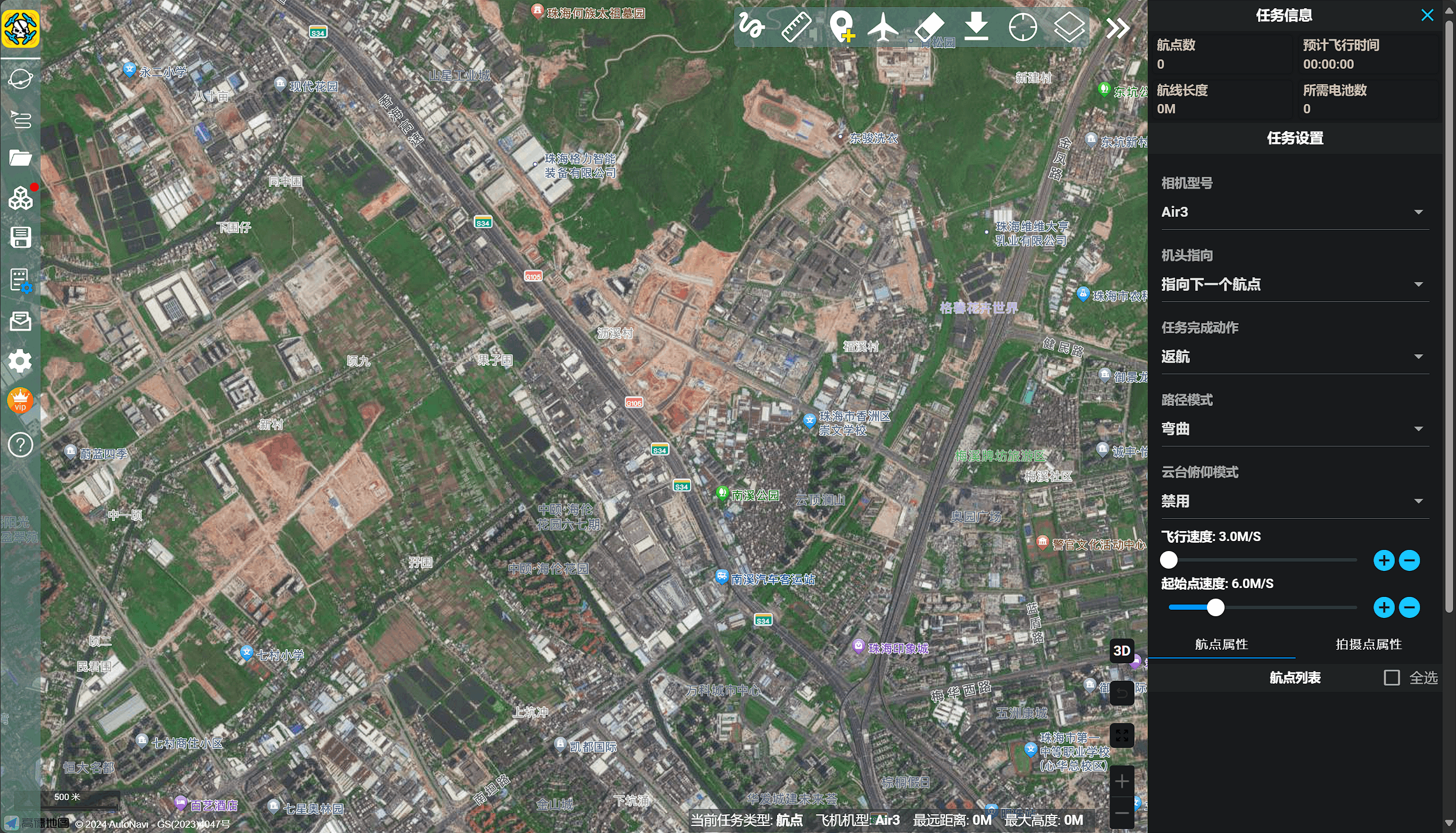
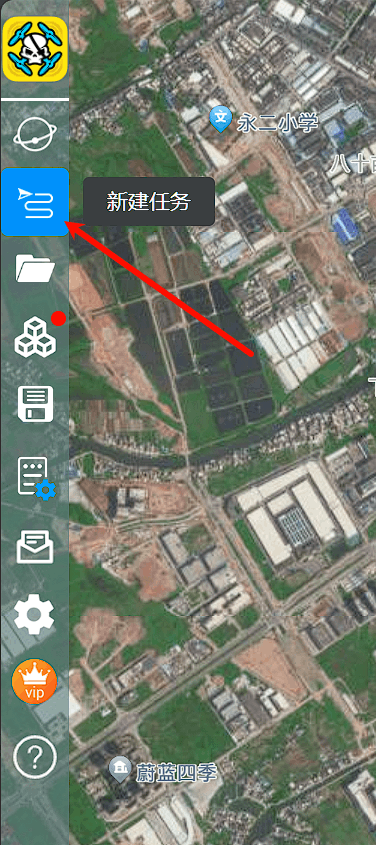
点击左侧新建任务.
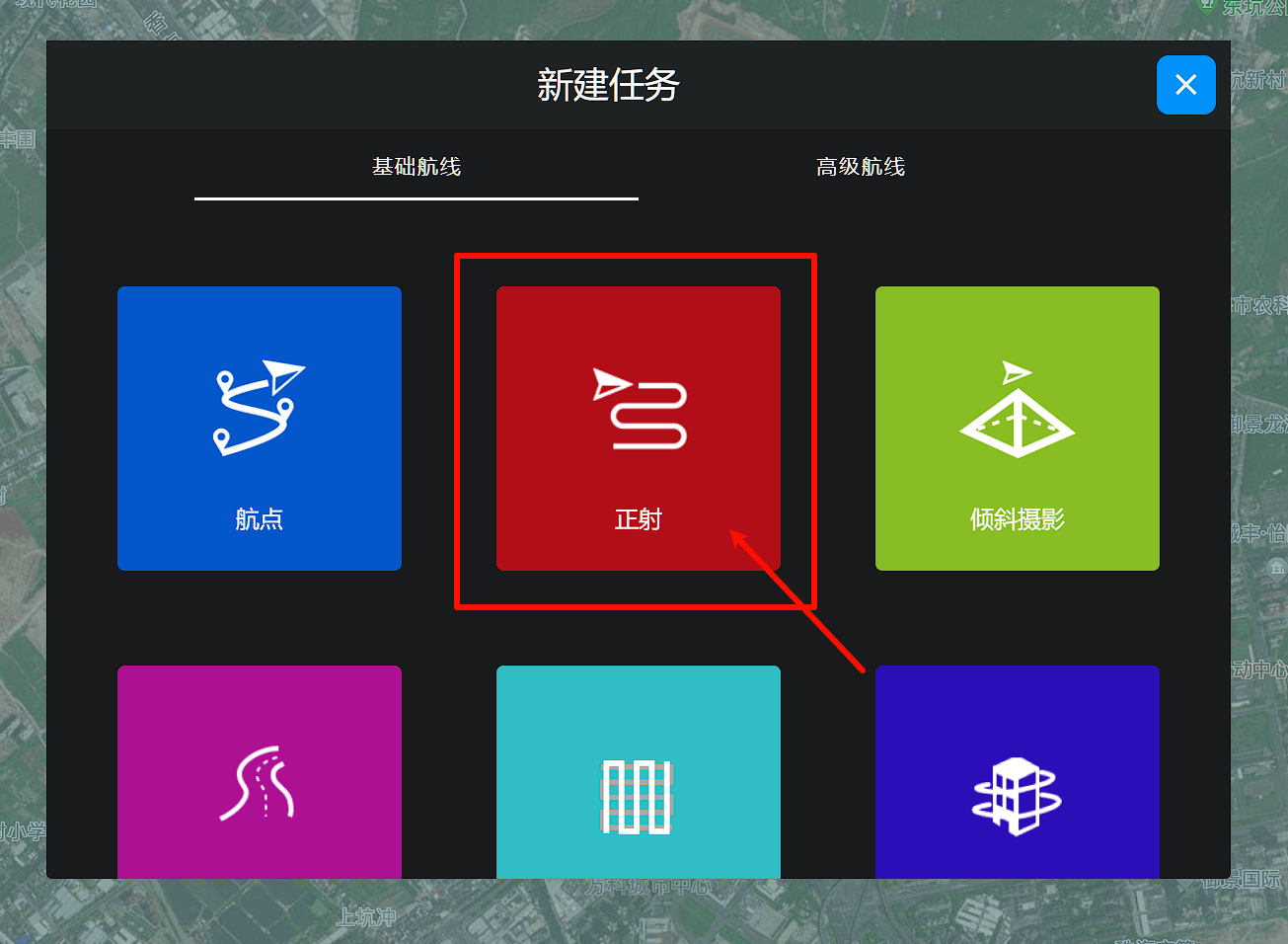
选择正射
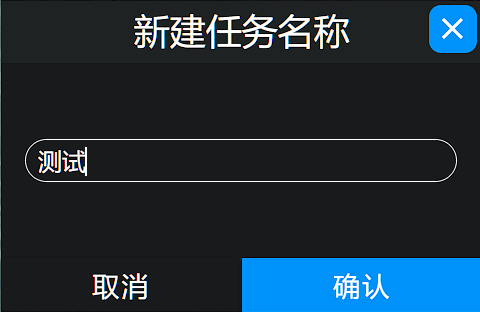
输入任务名称
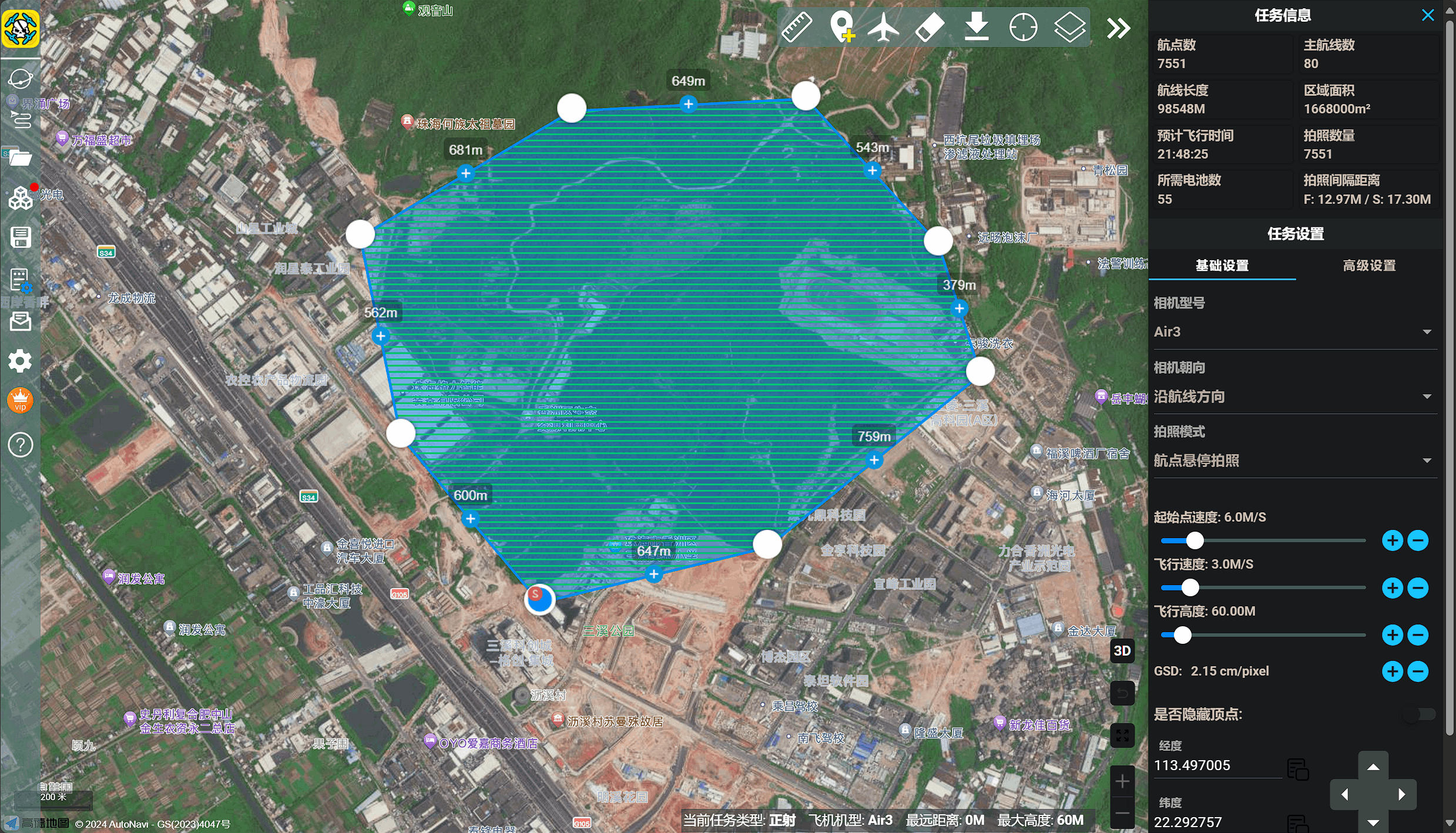
确认之后, 找到我们需要飞行的区域. 任意点击一个区域, 生成一个默认的范围.
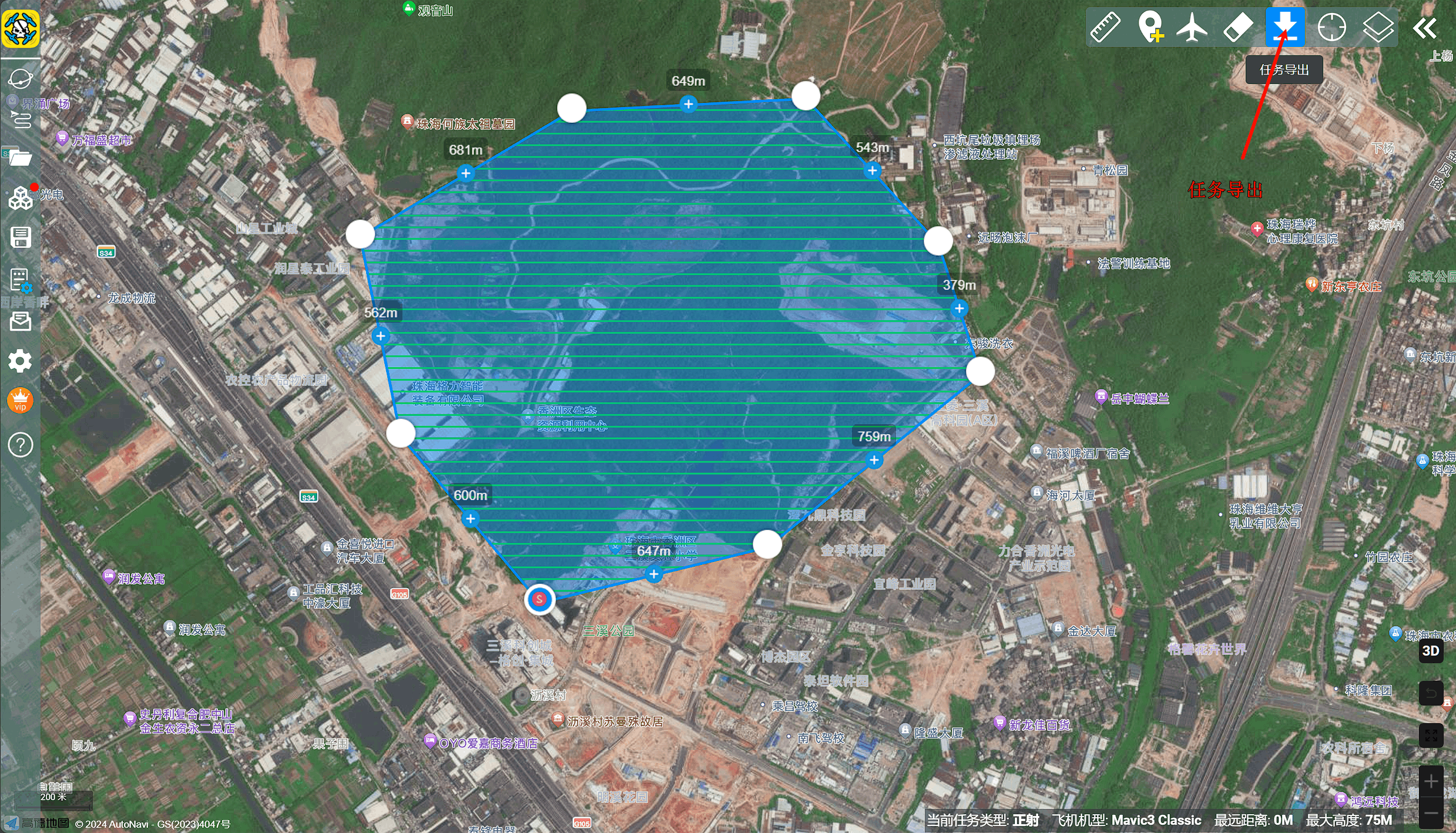
然后, 调整这个范围至合适位置. 可以移动和添加顶点
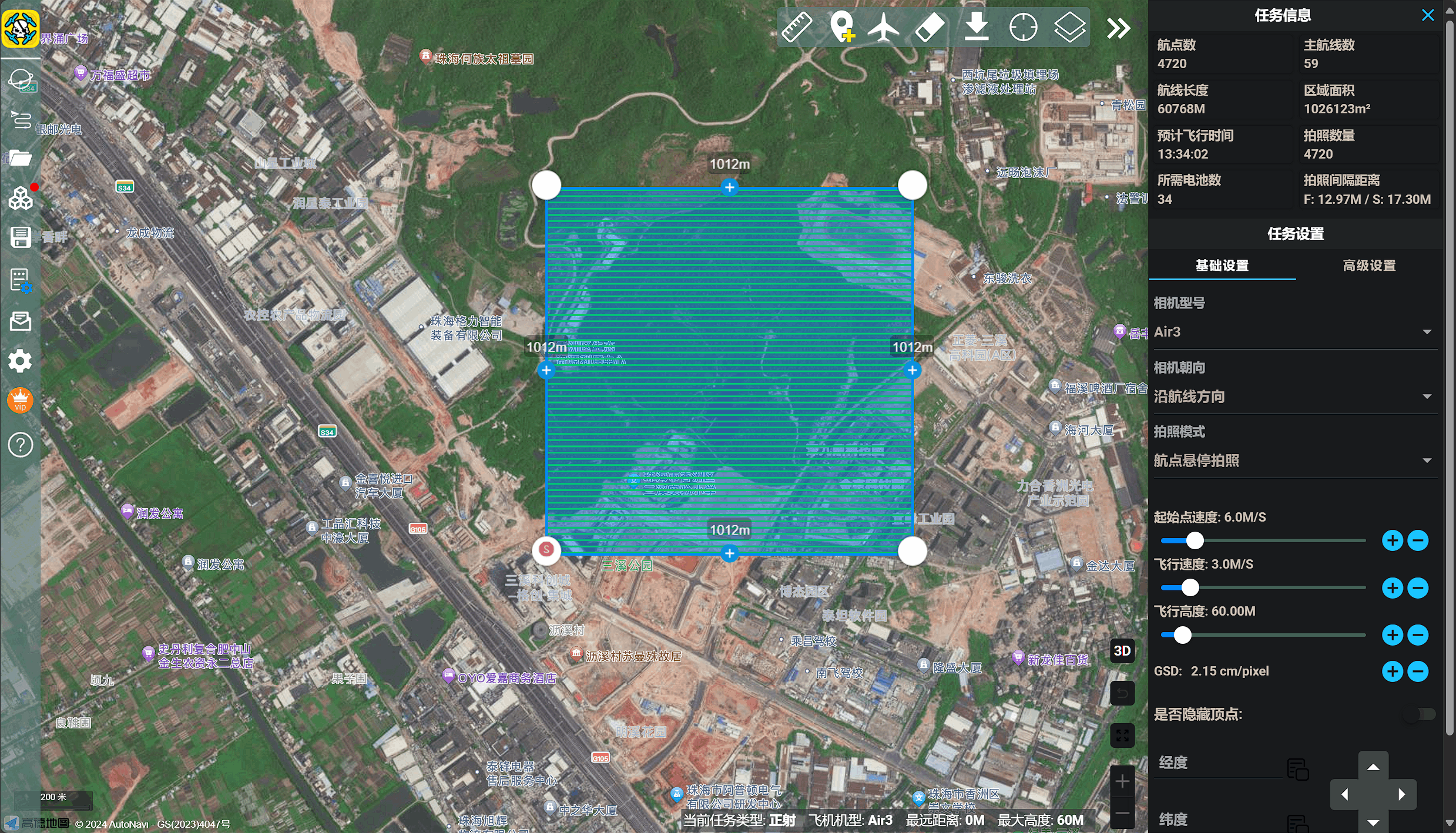
然后, 调整右侧参数栏的参数.
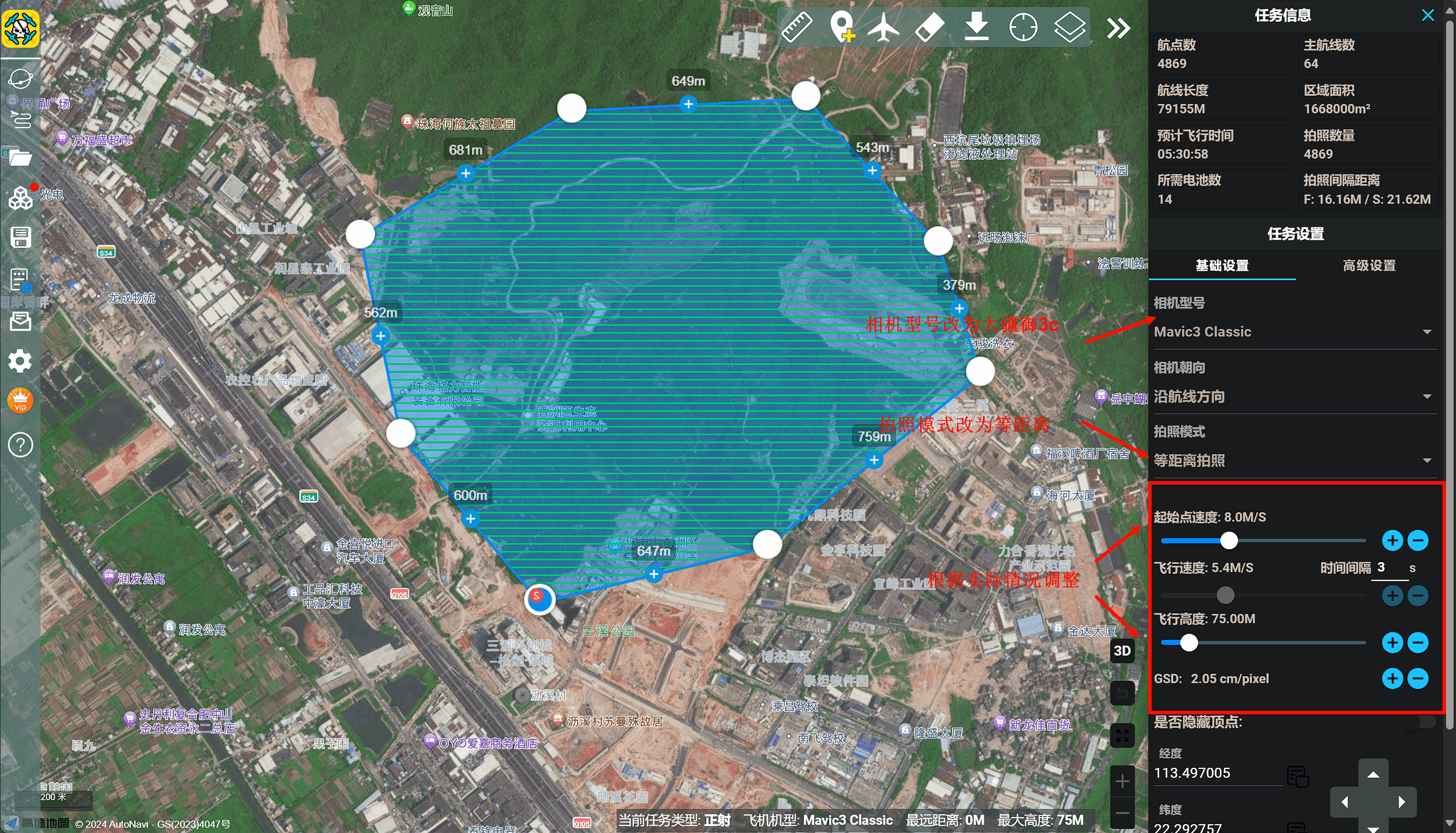
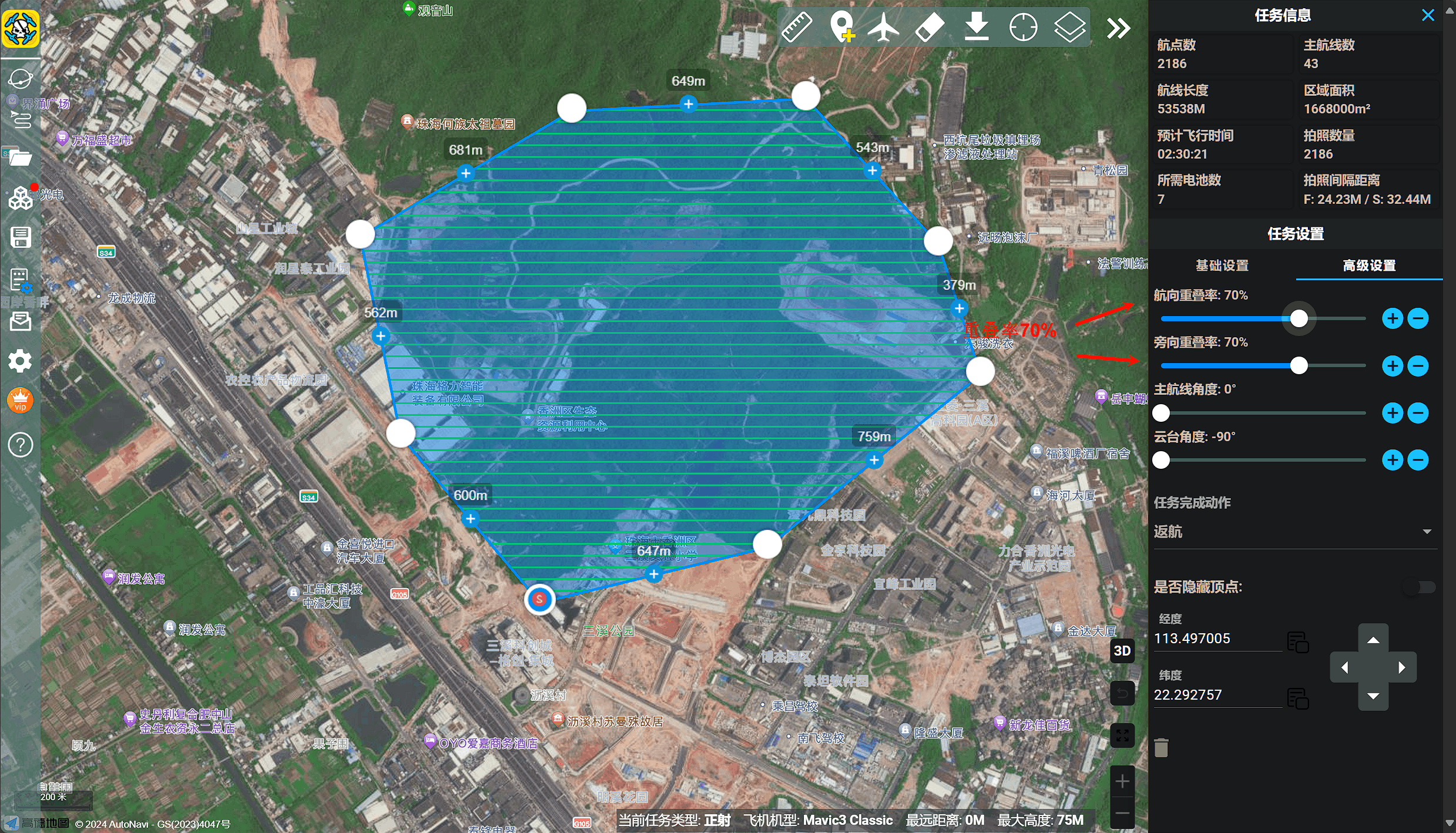
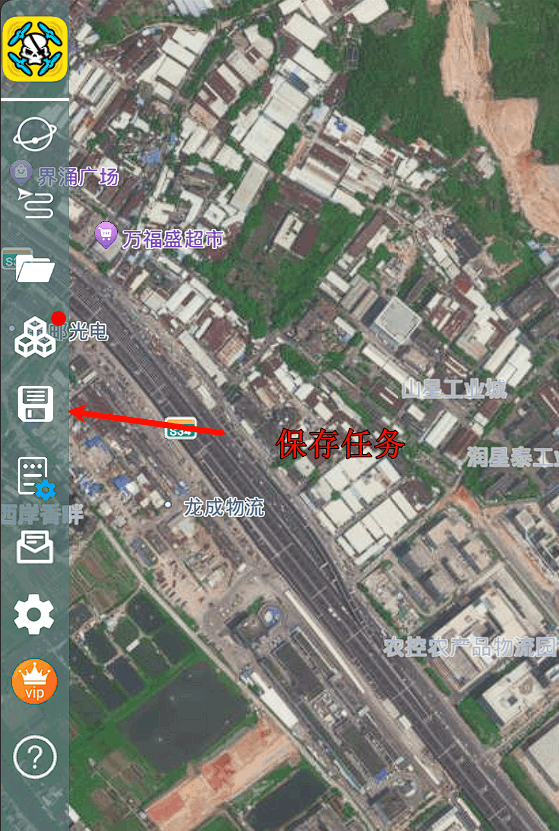
其余设置与上图保持一致, 保存任务
点击右上角任务导出
选择合适的航点数, 每个文件最多支持300个航点. 航点越多单文件加载越慢.
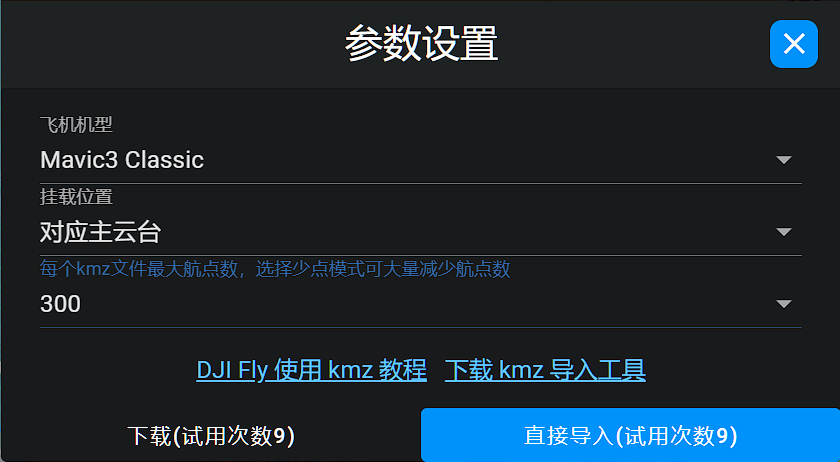
点击下载, 将文件下载并导入到SD卡中.
2. 导入航线
根据导入教程导入文件Mavic3系列屏控手动导入Kmz航点任务
2.1 创建并备份航线
创建任意数量的航点, 保存.
航点文件保存位置如下
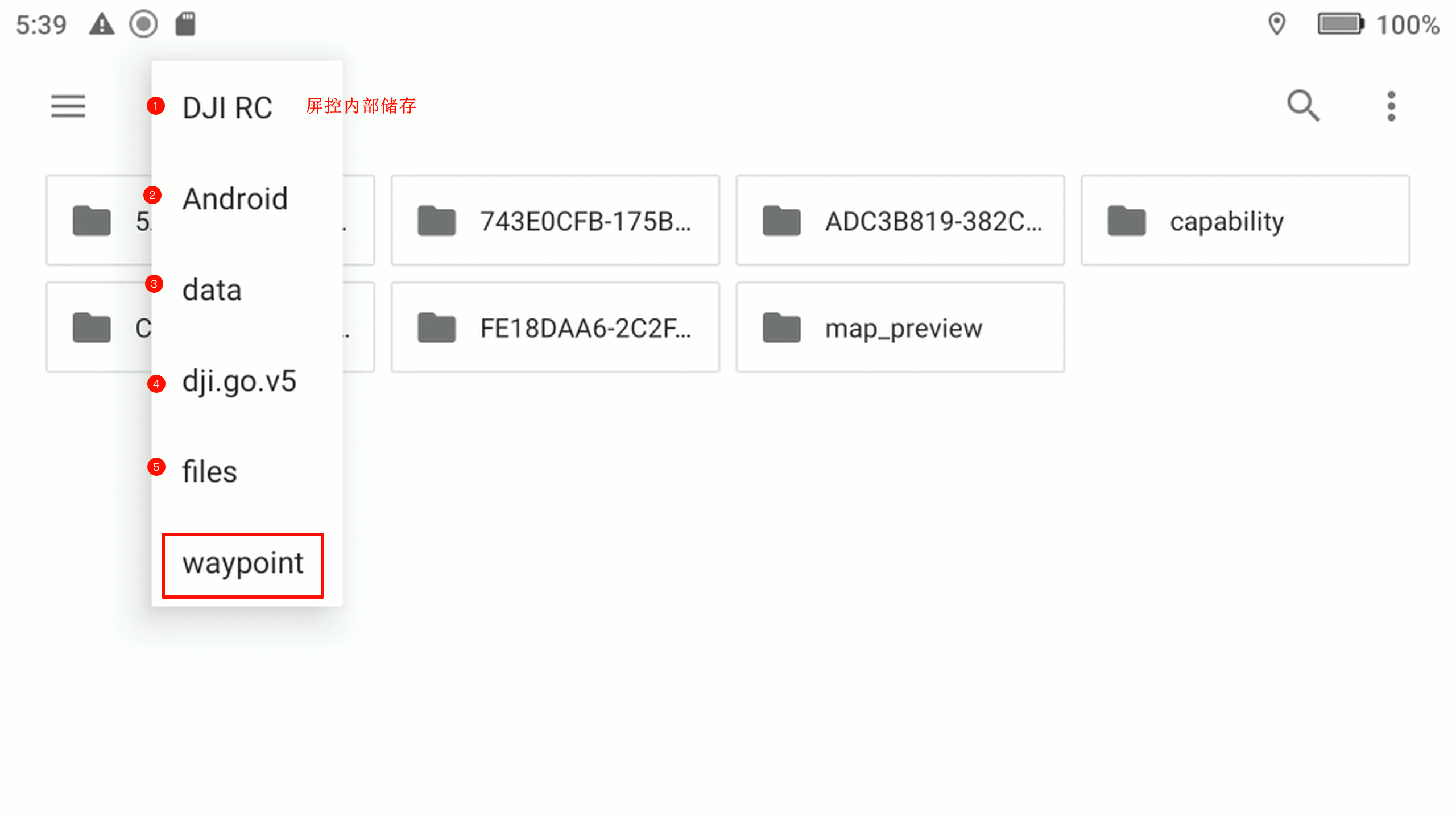
一串英文字符的文件夹内存放的就是航线文件(kmz格式)
将整个waypoint文件夹复制至SD卡中
2.2 替换kmz文件
将已经下载好的Kmz文件同样导入到SD卡的该文件夹内
注意一个文件内只有一个kmz文件, 导出多个文件时需要提前创建好足够数量的航点文件(单文件最大支持300个航点).
将文件夹内的kmz文件名称复制 -> 删除 -> 导入下载的kmz文件 -> 重命名为刚复制的文件名(即保证文件名不更换)
最后将替换好的waypoint文件夹替换回去
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Firefly Blog | 萤火虫博客!
 wechat
wechat zanshang
zanshang alipay
alipay
相关推荐




评论